
HOMER – Hoch-redundante modulare Robotersysteme zum flexiblen Einsatz in der Raumfahrt und in der Automotive-Serienfertigung
Modulare hoch-redundante Robotersysteme, die flexibel in der Raumfahrt auf Kleinsatelliten oder Rovern eingesetzt und auf minimalem Volumen verstaut werden können. Grundlage hierfür sind neuartige Robotergelenke und –glieder, die sich je nach Anwendung zu einem neuen robotischen Aktuator re-konfigurieren lassen.
Laufzeit des Vorhabens: 01.06.2019 – 31.05.2021
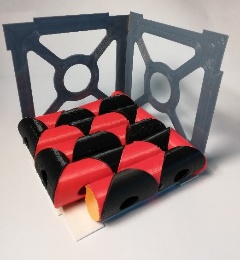
Das Ziel dieses Vorhabens ist die Entwicklung von modularen hoch-redundanten Robotersystemen, die flexibel in der Raumfahrt auf Kleinsatelliten oder Rovern eingesetzt und auf minimalem Volumen verstaut werden können. Grundlage hierfür sind neuartige Robotergelenke und -glieder, die sich je nach Anwendung zu einem neuen robotischen Aktuator re-konfigurieren lassen. Basierend auf der im Projekt iBOSS (intelligent Building Blocks for On-orbit Satellite Servicing and Assembly) entwickelten multifunktionalen Schnittstelle lässt sich ein angepasstes, miniaturisiertes Interface entwickeln, mit der sich ein solches modular erweiterbares Robotersystem realisieren lässt. Ein entsprechendes Baukastenprinzip modularer Roboter bietet ein hohes Transferpotential in die terrestrische Serienfertigung (z.B. im Automotive-Bereich) und die mobile Robotik auf der Erde. Hierzu werden zwei Roboterarme entwickelt. Zum einen ein auf dem HOMER-Roboter-Konzept des IRAS fokussierten leichten und kompakten Roboter mit vielen gleichartigen Gelenken. Dies dient zum überprüfen des Gesamtkonzeptes und wird zur Herleitung der Kinematik benötigt. Abb. 1 veranschaulicht das Konzept mit 3D-gedruckten roten und schwarzen Elementen, die identische Gelenke darstellen. Dieses Konzept ist für die Nutzung auf CubeSats ausgelegt, um robotische Operationen im Weltraum mit Kleinsatelliten zu ermöglichen und zeichnet sich im Wesentlichen durch drei Neuheiten aus:
I) HOMER ist ein hyperredundanter Roboterarm, d. h. wenn ein Gelenk versagt, gibt es eine große Anzahl anderer Gelenke, die das Versagen ausgleichen können. Dadurch kann die entsprechende Hardware aus kommerziellen Bauteilen gefertigt werden, was eine signifikante Reduktion der Kosten nach sich zieht.
II) HOMER ist kleiner und leichter als herkömmliche Weltraumroboter. Er ist auf einen kompakten Bauraum (1 CubeSat Unit = 1U) zusammenfaltbar und ist damit auf CubeSats einsetzbar. Ein solcher Roboter besitzt einen großen Arbeitsraum der mit dem Bauraum skaliert, z. B. kann ein 1U-Bauraum auf 1,5 m Arbeitslänge entfaltet werden. Damit kann ein solcher Roboter auf Satellitenmissionen fast beliebiger Größe effektiv eingesetzt werden.
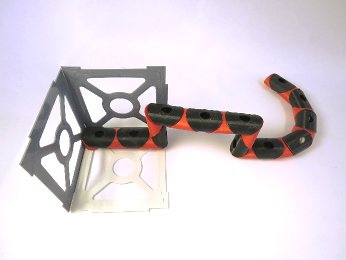
III) Aufgrund seiner Bauart kann HOMER schwer zugängliche Manipulationsorte erreichen und sogar hinter Hindernissen (z.B. im Inneren von Satelliten) arbeiten wie Abb. 2 verdeutlicht. Somit sind robotische Operationen im Weltraum möglich, die bisher nicht durchgeführt werden konnten.
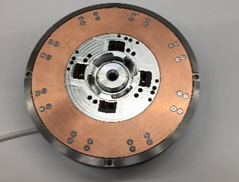
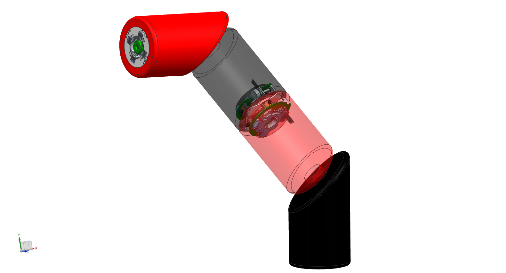
Der zweite Arm wird eine modifizierte hoch-skalierte größere Version des HOMER-Konzepts sein und mit einer angepassten iSSI-Schnittstelle (Abb. 3) erweitert werden, um das robotische System einfach und schnell erweitern zu können und somit optimal an die durchzuführende Mission anzupassen. Durch den Einsatz der iSSI-Schnittstelle ist es möglich das robotische System zu modularisieren, da hiermit nicht nur eine lösbare mechanische Verbindung hergestellt werden kann, sondern auch die Versorgung der Module mit Daten und Strom sichergestellt werden kann. Durch die kompakten Abmessungen bei gleichzeitig hoher Funktionalität und Redundanz eignet sich die iSSI ideal für die Verwendung in einem modularen Robotersystem, da eine verhältnismäßige einfache Integration in die Struktur der Robotermodule möglich ist (siehe Abb. 4). Damit soll es ein hoch-redundantes modulares Roboter-Baukastensystem (HOMER) geben, welches flexibel und einfach an die jeweilige Aufgabe angepasst werden kann.
Institutionen/ Verbundpartner
Technische Universität Braunschweig, Institut für Raumfahrtsysteme (Verbundführer)
Hermann Blenk-Str. 23
D-38108 Braunschweig
Ansprechpartnerin:
Prof. Dr.-Ing. Enrico Stoll, B.Sc.
Tel.: +49 531 391 9960
e.stoll@tu-braunschweig.de
Dipl.-Ing. Benjamin Grzesik
Tel.: +49 531 391 9988
b.grzesik@tu-braunschweig.de
Carlos de Alba- Padilla, M.Sc.
Tel.: +49 531 391 9976
c.de-alba-padilla@tu-braunschweig.de
Rheinisch-Westfälische Technische Hochschule Aachen, Institut für Strukturmechanik und Leichtbau
Wüllnerstraße 7
D-52062 Aachen
www.sla.rwth-aachen.de
Ansprechpartner:
Prof. Dr.-Ing. Kai-Uwe Schröder
Tel.: +49 241-80-98630
kai-uwe.schroeder@sla.rwth-aachen.de
Christopher Zeis, M.Sc.
Tel.: +49 241 80 96840
christopher.zeis@sla.rwth-aachen.de
