Deep sea or Mars?
Robots don’t care.
© DLR
ROBEX (robotic exploration under extreme conditions) is the first joint project worldwide bringing space flight and deep sea research together. A total of
16 institutions distributed all over Germany (among them the DLR) are jointly developing technologies that are to facilitate the exploration of hard-to-reach regions with extreme environmental conditions like the deep sea, polar regions, our Earth moon, but also other celestial bodies.
For Mars
For a Jupiter moon
For under water
For robotic pilots
For 50 euros

© DLR CC BY 3.0
DLR ranks among the world’s leading innovators developing complex humanoid robotics. In the METERON SUPVIS-Justin experiment, the intelligent DLR robot Justin, equipped with DLR hands suitable for space, simulates repair work in DLR’s Mars laboratory. It was remote-controlled by Alexander Gerst using a tablet: as a “true” coworker, Justin was just told “what” kind of work needed to be done but not how to handle it. Maybe he will build a colony on the Moon or houses on Earth?
© DFKI
SherpaTT is an autonomous exploration vehicle that might explore Mars. It was developed by the German Research Center for Artificial Intelligence (DFKI), funded by DLR with funds from the Federal Ministry for Economic Affairs and Climate Action. The design combines ideas from nature and technology. Wheels are ideally suited to quickly gain ground on flat terrain. They are attached to four active “spider legs“. To enable autonomous movement of Sherpa, it scans the Martian surface with LIDAR and cameras to identify obstacles or to drive over them by lifting the “body”. This technology is also interesting for Earth, for instance, for research expeditions or as a “delivery spider” for remote regions. The chassis is even waterproof, hence the SherpaUW version can be used under water.
© DFKI
Or how about 20 legs? For Coyote III (and its siblings named Asguard) the wheel was reinvented. It is not round but consists of five legs, with which Coyote III can move where wheels would side-slip: in planet craters, in the snow, on stairs and even under water! On Earth, equipped with suitable sensors, it is capable of sniffing out gas or CO and warn fire fighters in rescue missions, acting as a vanguard. In space, Coyote III is the speedy little helper of SherpaTT: the large robot takes soil samples, and the little robot is in charge of the shuttle service for taking the soil samples to the base station.
© DFKI
The DFKI robot “Mantis“ has six legs, two of them also acting as arms. The robotic giant insect can climb well with all six legs and uses the two forelimbs as gripper arms to take soil samples. Legs are at an advantage versus wheels in rough terrain.
© DFKI
Two arms and two legs have also stood the test, which is proven by the monkeyish iStruct robot by DFKI. It keeps the balance very well, it can walk on all fours – and it masters upright walking.
Each type of movement has its advantages. In a Mars mission, it is easily conceivable to take a large team consisting of autonomous and interlinked robots with legs, wheels, and wings along to enable the robots to optimally arrange their work – geared to their capabilities and the terrain.
© ESA
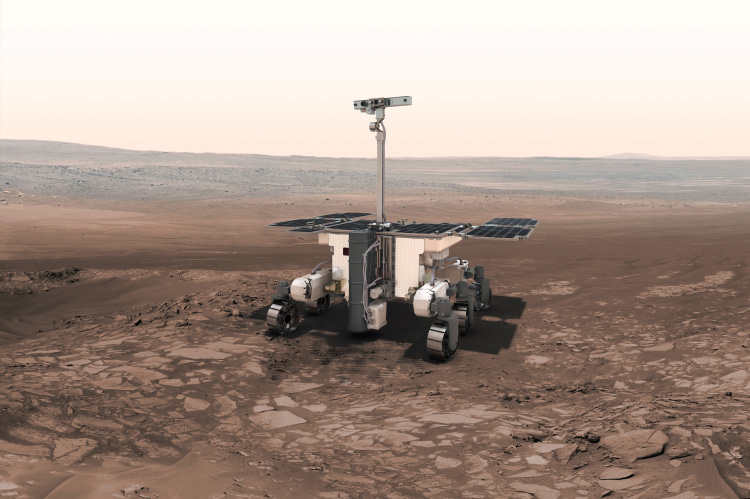
2021: the time has come for the ExoMars Rover
It is scheduled to land on Mars in 2021: ESA’s autonomous ExoMars Rover with six wheels. The wheels are made of metal, not rubber, in order not to contaminate Mars with organic material from the Earth such as rubber. It will use a drill to take soil samples of the lowlands of “Oxia Planum“ and will analyse them in the piggyback laboratory – maybe this might provide evidence that there was life on Mars long ago.
© NASA
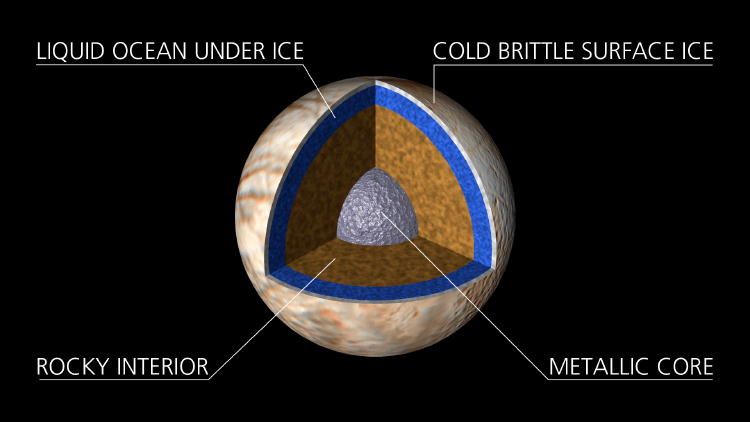
Jupiter’s moon Europa is icy. The assumption: underneath an icesheet with a thickness of several kilometres there is a huge (very interesting) ocean of liquid water. How to research? By flying there! The idea of the “Europa-Explorer” mission:
- Making a probe land on Europa
- On board: some sort of heated freight torpedo that melts its way through the ice
- Upon arrival in the ocean, this torpedo opens:
- First, a swarm of mini-submarines starts that hang themselves onto the ice cover (from underneath, of course) – quasi as navigation “satellites”
- Then an autonomous research submarine (AUV) is splashed down whose first job is to calibrate the “navigation device” and which then dives into the depths of the ocean – to explore the ocean bed
- After the mission has been completed, the AUV knows where to find its “garage”, swims there, docks, transmits data and charges the batteries
With such a mission, among other things we could find out what’s the matter with this water. All around the water there is an infinite number of questions anyway: How came the water to this moon? Why isn’t there any water on our Moon? How did water come to Earth after all?
© DFKI
The suitable AUV already exists in outline: “Leng” dives under the ice, finds its way back to the base station through modified QR codes – and docks there autonomously.
Wally – searching for methane
© Ocean Networks Canada, A University of Victoria Initiative
This is Wally. A deep-sea track vehicle, a so-called “crawler”, built by Jacobs University of Bremen. It explores the seabed at the methane emersion points of Barkley Canyon, at a depth of 900 metres off the coast of Vancouver Island on the Canadian west coast. On board: a methane sensor and a camera for automatic 3D mapping. It orients itself through navigation markers and is the first deep-sea crawler that is remote-controlled via the internet (not via WLAN, but using a long cable).
The Mars GPS working under water as well
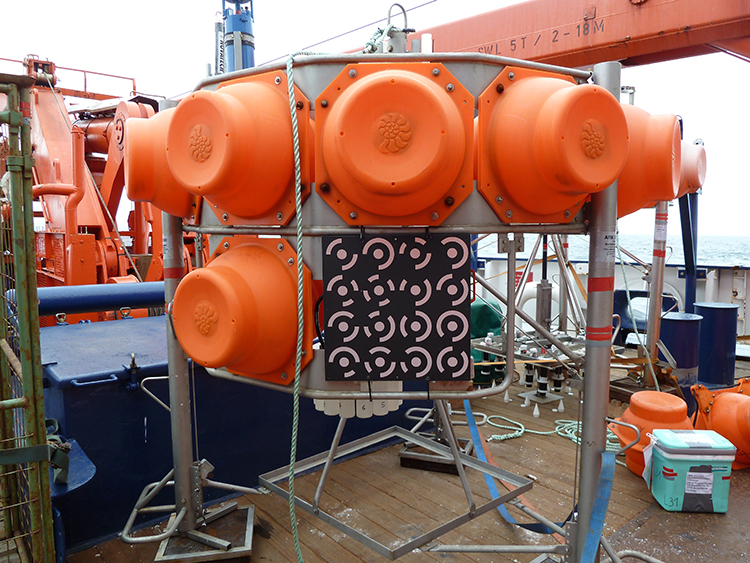
© Alfred Wegener Institute
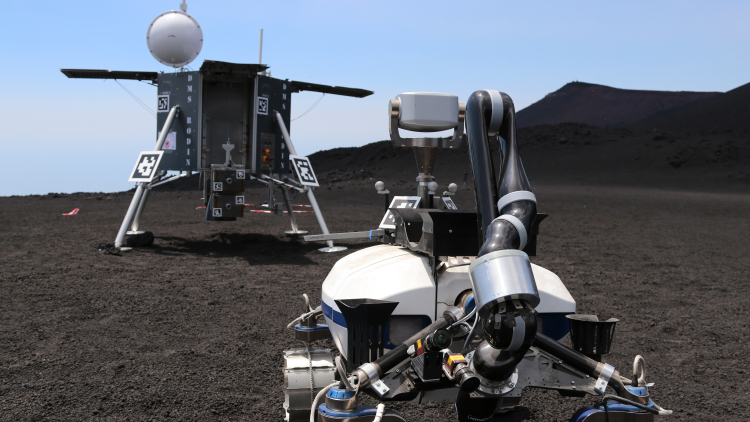
On Earth, navigation systems are working via GPS. However, they would fail on far-away planets or under water. To this end, Airbus Defence and Space developed sort of an underwater GPS. Its function is based on a navigation marker, which is a distinctive diagram serving as an orientation point under water. Such markers also play an important role in space flight, as can be seen here for the “Lightweight Rover Unit” (LRU) of DLR, which orients itself by means of other graphic codes. LRU is intended for seismic measurements, for instance on the Moon. It autonomously takes sensor boxes from the “boot” of the landing module and places them autonomously in the environment – without a navigation device, without human intervention.
© DLR CC BY 3.0
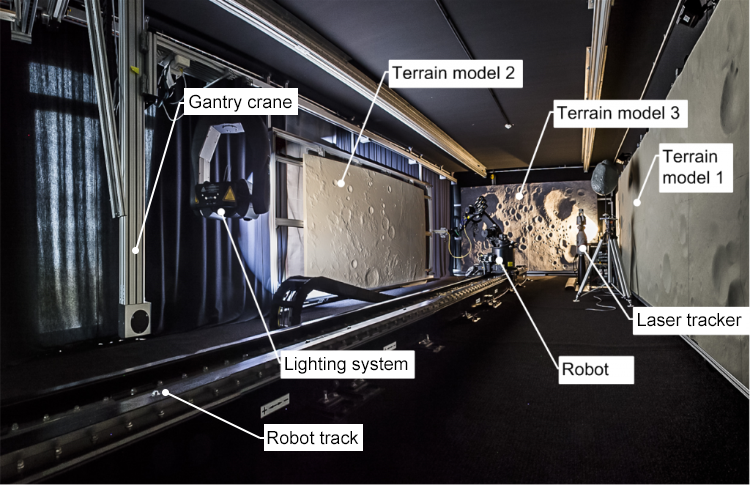
© DLR
Experienced pilots can see if a spot on a planet is suitable for landing. With TRON, the “Testbed for Robotic Optical Navigation” from DLR, robots are trained for this capability. In the future, space probes should land autonomously on planets or asteroids and space cargo carriers should dock onto a space station or a Moon station unaided. For that to succeed, robots learn with the help of maps and simulated terrain models to rely on their own “eyes” (and sophisticated algorithms).
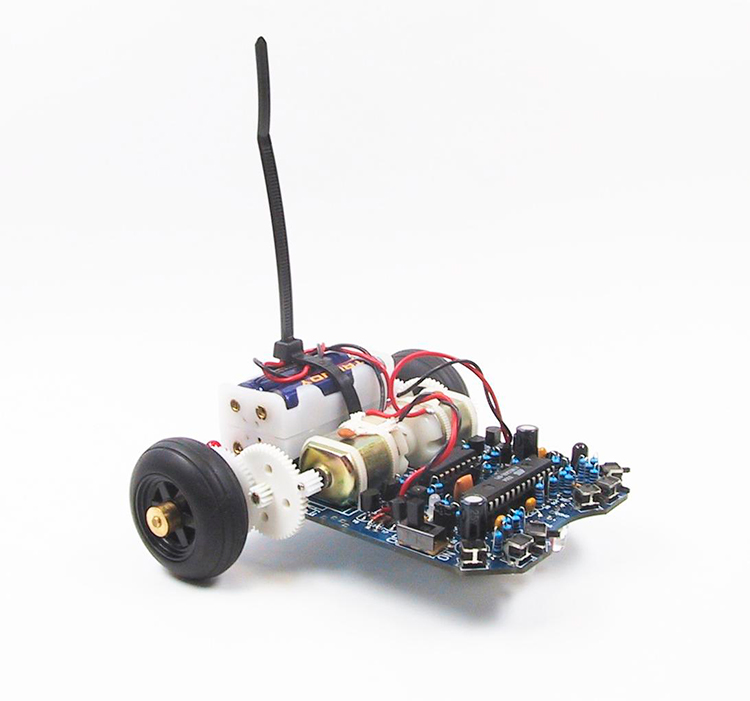
50 euros and a soldering iron = a robot:
the DLR Asuro
© Sebastian Wallroth
Robots are heavy and expensive? Not necessarily. For about 50 euros, one of the most favourably priced robots is available at an electronic mail-order company: the DLR Asuro. It has been developed at the DLR Institute of Robotics and Mechatronics to give hobby robotics enthusiasts the opportunity to learn about the basics of robotics in a hands-on experience. Hands-on should be taken literally: the Asuro is an assembly kit. It has to be pieced together and soldered.
However, the surprising midget weighing only 165 grammes packs a punch: for example, two separately controllable motors, six tactile sensors (to detect obstacles) and two photodiodes (to distinguish bright and dark). Asuro can be programmed with C as a standard, with a modification on the hardware also with Java. In the amateur craftsmen scene, an instruction can be found how to “dispose of the Asuro in marriage” to an Arduino.