Tiefsee oder Mars –
für Roboter egal
ROBEX (Robotische Exploration unter Extrembedingungen) ist weltweit das erste Gemeinschaftsprojekt, das Raumfahrt- und Tiefseeforschung zusammenbringt. Insgesamt 16 über ganz Deutschland verteilte Institutionen (darunter das DLR) entwickeln gemeinsam Technologien, die die Erforschung schwer erreichbarer Gebiete mit extremen Umweltbedingungen wie Tiefsee, Polargebiete, unser Erdmond, aber auch andere Himmelskörper in Zukunft erleichtern sollen.
Für den Mars
Für einen Jupitermond
Für unter Wasser
Für Roboterpiloten
Für 50 Euro

© DLR
Das DLR zählt zu den weltweit führenden Innovatoren, die komplexe, humanoide Robotik entwickeln. Beim Experiment METERON SUPVIS-Justin simuliert der intelligente DLR-Roboter Justin, ausgestattet mit weltraumtauglichen DLR-Händen, einen Reparatureinsatz im Marslabor des DLR. Ferngesteuert wurde er von Alexander Gerst auf der ISS mit einem Tablet: Justin erhielt als echter „Mitarbeiter“ nur Aufträge, „welche“ Arbeit jetzt ansteht – aber nicht, „wie“ er sie umzusetzen hat. Vielleicht wird er einst eine Mondkolonie aufbauen – oder Häuser auf der Erde?
© DFKI
SherpaTT ist ein autonomes Erkundungsgefährt, das vielleicht den Mars erkunden wird. Es wurde vom Deutschen Forschungszentrum für Künstliche Intelligenz (DFKI) entwickelt (gefördert vom DLR mit Mitteln des Bundeswirtschaftsministeriums). Das Design vereint Ideen aus Natur und Technik. Räder eignen sich hervorragend, um auf ebenen Strecken schnell voranzukommen. Diese sind an vier aktiven „Spinnenbeinen“ angebracht. Damit Sherpa sich autonom bewegen kann, scannt es mit LIDAR und Kameras die „Mars“-Oberfläche, um Hindernisse zu erkennen oder durch Anheben des „Körpers“ darüber hinwegzufahren. Diese Technik ist auch für die Erde interessant, zum Beispiel für Forschungsexpeditionen oder als „Lieferspinne“ für abgelegene Regionen. Das Fahrwerk ist sogar wasserdicht, damit kann die Version SherpaUW unter Wasser eingesetzt werden.
© DFKI
Oder wie wäre es mit 20 Beinen? Für Coyote III (und seine Geschwister namens Asguard) wurde das Rad neu erfunden. Es ist nicht rund, sondern besteht aus fünf Beinen. Damit kann sich Coyote III überall dort fortbewegen, wo Räder wegrutschen würden: in Planetenkratern, im Schnee, auf Treppen und sogar unter Wasser! Im Erdeinsatz kann er – mit den passenden Sensoren – auch Gas oder CO erschnüffeln, um als Vorhut bei Rettungseinsätzen Feuerwehrleute zu warnen. Im All ist Coyote III das flinke Helferlein von SherpaTT: Der große Roboter nimmt Bodenproben, und der kleine Roboter übernimmt den Shuttledienst, der die Bodenproben zur Basisstation bringt.
© DFKI
Der DFKI-Roboter „Mantis“ (Englisch für Gottesanbeterin) hat sechs Beine, von denen zwei auch Arme sind. Das Robo-Rieseninsekt kann mit allen sechs Beinen gut klettern, und zur Entnahme von Bodenproben nutzt es die beiden Vordergliedmaßen als Greifarme. Beine sind im Vergleich zu Rädern im Vorteil, wenn das Terrain sehr uneben ist.
© DFKI
Zwei Arme und zwei Beine haben sich auch bewährt. Das zeigt der affenartige Roboter iStruct des DFKI. Er hält sehr gut die Balance, er kann auf allen Vieren gehen – und er hat den aufrechten Gang gelernt.
Jede Fortbewegungsart hat eigene Vorteile. Bei einer Marsmission ist es deshalb denkbar, ein großes Team aus autonomen und vernetzten Robotern mit Beinen, Rädern und Flügeln mitzunehmen, damit sich die Roboter die Arbeit optimal einteilen können – abgestimmt auf Fähigkeiten und Terrain.
© ESA
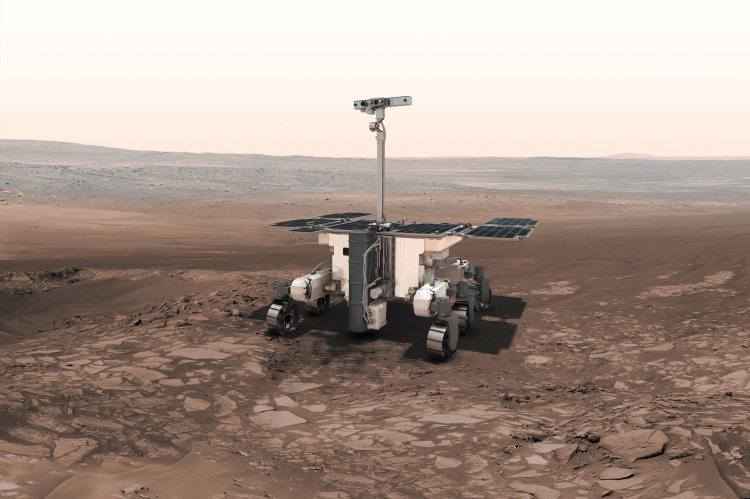
2021: Zeit für den ExoMars Rover
2021 soll er auf dem Mars landen: der autonome ExoMars Rover der ESA mit sechs Rädern. Die Räder sind aus Metall, nicht aus Gummi, um den Mars nicht mit organischem Material wie Gummi von der Erde zu kontaminieren. Mit einem Bohrer wird er Bodenproben der Tiefebene „Oxia Planum“ nehmen und im Huckepack-Labor analysieren – vielleicht gelingt so der Nachweis, dass es auf dem Mars einst Leben gab?
© NASA
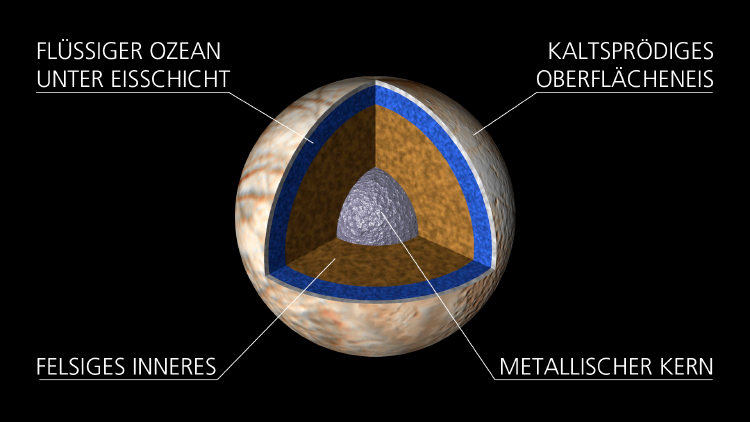
Der Jupitermond Europa ist eisig. Die Vermutung: Unter einer mehrere Kilometer dicken Eisschicht gibt es einen gewaltigen (sehr interessanten) Ozean aus flüssigem Wasser. Wie erforschen? Hinfliegen! Die Idee der Mission „Europa-Explorer“:
- Eine Sonde auf Europa landen lassen
- An Bord: eine Art beheizter Fracht-Torpedo, der sich durch das Eis schmilzt
- Im Ozean angekommen, öffnet sich dieser Torpedo:
- Zuerst startet ein Schwarm aus Mini-U-Booten, die sich (natürlich von unten) an die Eisdecke hängen – quasi als Navigations-„Satelliten“
- Dann wird ein autonomes Forschungs-U-Boot (AUV) gewassert, das als ersten Job das „Navi“ kalibriert, um dann in die Tiefen des Ozeans abzutauchen – um den Ozean und den Meeresgrund zu erforschen
- Nach Ende der Mission weiß das AUV, wo seine „Garage“ ist, schwimmt hin, dockt an, übermittelt Daten und lädt die Akkus auf
Mit so einer Mission ließe sich unter anderem herausfinden, was es mit diesem Wasser auf sich hat. Rund um das Wasser gibt es sowieso noch endlos viele Fragen: Wie kam das Wasser auf diesen Mond? Wieso hat unser Mond kein Wasser? Wie kam überhaupt das Wasser auf die Erde?
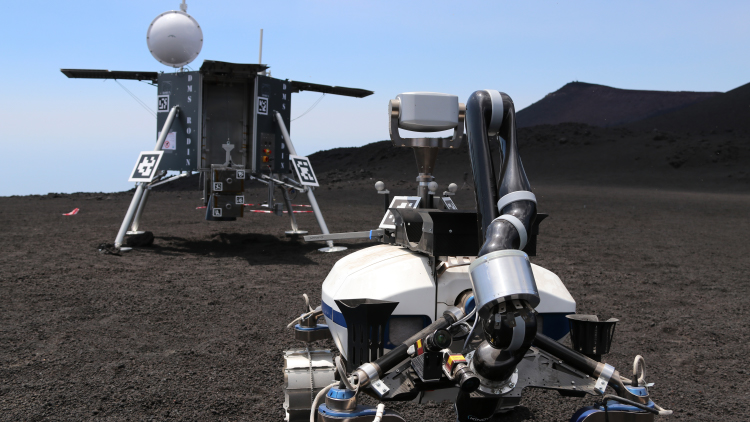
© DFKI
Das passende AUV dazu gibt es schon in Grundzügen: „Leng“ taucht unter dem Eis, findet über abgewandelte QR-Codes zurück zur Basisstation – und dockt dort autonom an.
Wally – auf der Suche nach Methan
© Ocean Networks Canada, A University of Victoria Initiative
Das ist Wally. Dieses Tiefsee-Kettenfahrzeug ist ein sogenannter „Crawler“, gebaut von der Jacobs University Bremen. Er untersucht den Meeresboden an den Methan-Austrittsstellen des Barkley Canyon, in 900 Metern Tiefe vor Vancouver Island an Kanadas Westküste. Mit an Bord: ein Methan-Sensor und eine Kamera für automatisches 3D-Mapping. Er orientiert sich an Navigationsmarkern und wird als erster Tiefseecrawler übers Internet ferngesteuert (nicht per WLAN, sondern über ein langes Kabel).
Das Mars-GPS,
das auch unter Wasser funktioniert
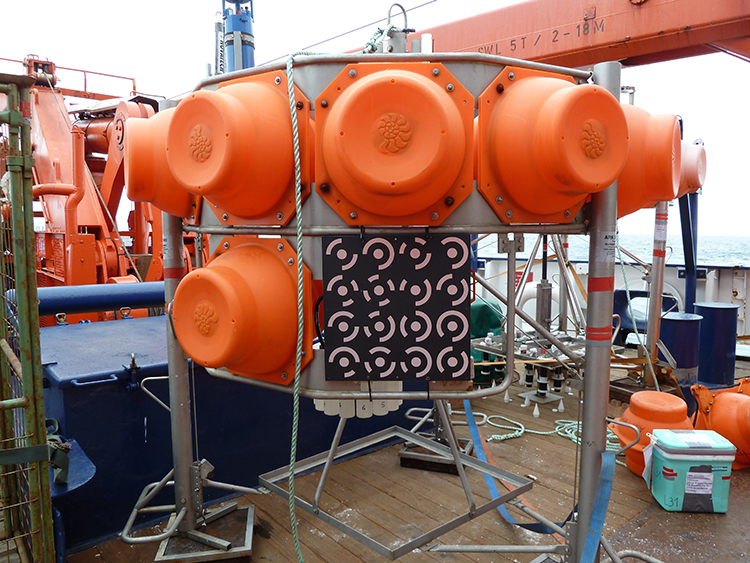
© Alfred-Wegener-Institut
Auf der Erde funktionieren Navigationssysteme dank GPS. Auf fernen Planeten oder unter Wasser würden sie allerdings versagen. Airbus Defence and Space hat deshalb eine Art Unterwasser-GPS entwickelt. Es funktioniert auf Basis eines Navigationsmarkers. Das ist eine markante Grafik, die unter Wasser als Orientierungspunkt dienen soll. In der Raumfahrt spielen solche Marker ebenfalls eine Rolle – wie hier für die „Lightweight Rover Unit“ (LRU) des DLR, die sich mit Hilfe von anderen Grafikcodes orientiert. LRU ist für seismische Messungen gedacht, beispielsweise auf dem Mond. Sie holt mit ihrem Greifarm autonom Sensorboxen aus dem „Kofferraum“ der Landefähre und platziert diese selbstständig in der Umgebung – ohne Navi, ohne menschlichen Eingriff.
© DLR CC BY 3.0
© DLR
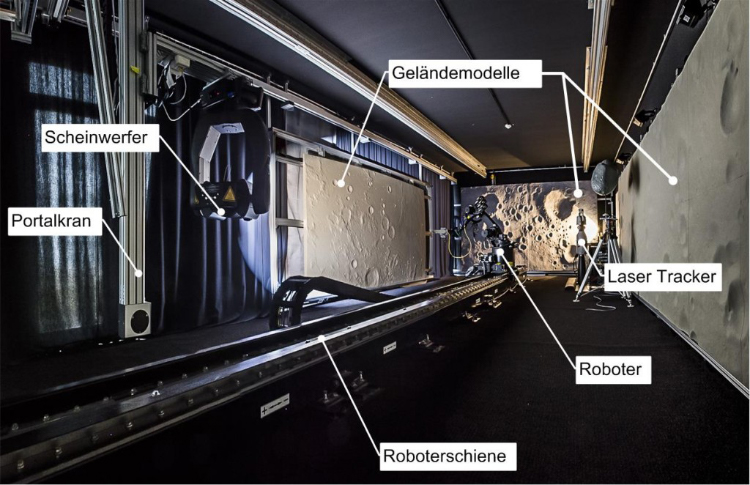
Erfahrene Pilotinnen und Piloten sehen, ob sich eine Stelle auf einem Planeten zur Landung eignet. Mit TRON, dem „Testbed for Robotic Optical Navigation“ des DLR, wird diese Fähigkeit auch Robotern antrainiert. Künftig sollen Raumsonden autonom auf Planeten oder Asteroiden landen und Raumfrachter ohne fremde Hilfe an einer Raumstation oder einer Mondstation andocken. Damit das klappt, lernen Roboter anhand von Karten und simulierten Geländemodellen, sich auf die eigenen „Augen“ (und raffinierte Algorithmen) zu verlassen.
50 Euro und ein Lötkolben = ein Roboter:
der DLR Asuro
© Sebastian Wallroth
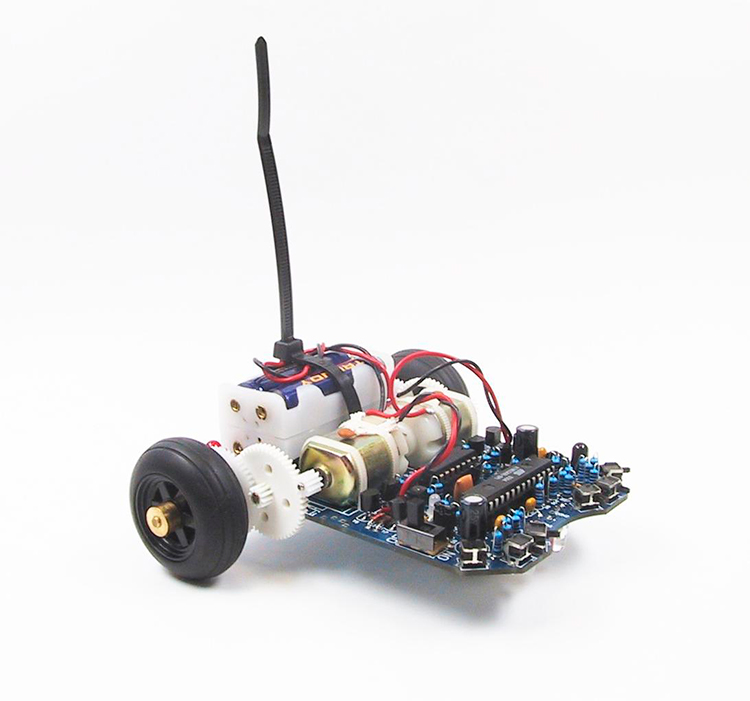
Roboter sind schwer und teuer? Nicht unbedingt: Für rund 50 Euro gibt es beim Elektronik-Versandhaus einen der günstigsten frei programmierbaren Roboter: den DLR Asuro. Er wurde im DLR-Institut für Robotik und Mechatronik entwickelt, damit sich interessierte Hobby-Robotiker die Grundlagen der Robotik eigenhändig aneignen können. Eigenhändig im Wortsinn: Der Asuro ist ein Bausatz. Es muss gebastelt und gelötet werden.
Aber der erstaunliche und 165 Gramm leichte Winzling hat es in sich: zum Beispiel zwei getrennt steuerbare Motoren, sechs Tastsensoren (um Hindernisse zu erkennen) und zwei Fotodioden (um Hell und Dunkel zu unterscheiden). Programmieren kann man Asuro standardmäßig mit C, nach einer Änderung an der Hardware auch in Java. In der Bastler-Szene findet man zum Beispiel eine Anleitung, wie man den Asuro mit einem Arduino verheiratet.