Colleague robot,
please take over!
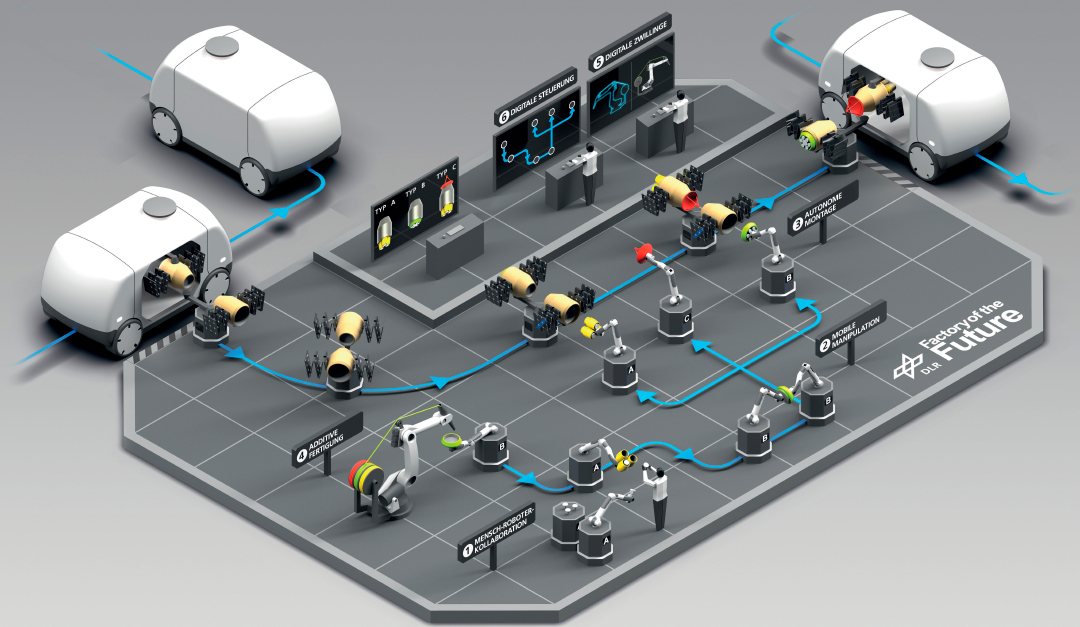
So far, robots and humans have rarely worked side by side. Common robots are mostly stubborn recipients of orders that blindly perform programmed movements and are hardly able to respond to unexpected changes in their environment. However, manufacture of products in small numbers and quickly changing market requirements need flexible and intelligent robot systems that can autonomously adapt to current requirements and the environment while being capable of interacting with humans intuitively and safely at the same time. Innovative hardware and control concepts as well as methods of artificial intelligence will enable that in the future. At DLR, a variety of new technologies and methods are being developed to enable flexible and adaptable future production.
How does human-robot collaboration (HRC) go smoothly? How can mobile robots autonomously take over “handicraft“ tasks, assemble products, or cooperate with 3D printers? Is it possible to plan ahead the real use of robots by means of simulation, and can they be digitally controlled? In the project “Factory of the Future”, ten DLR institutes are jointly working on these issues to develop trend-setting technologies.
© DLR
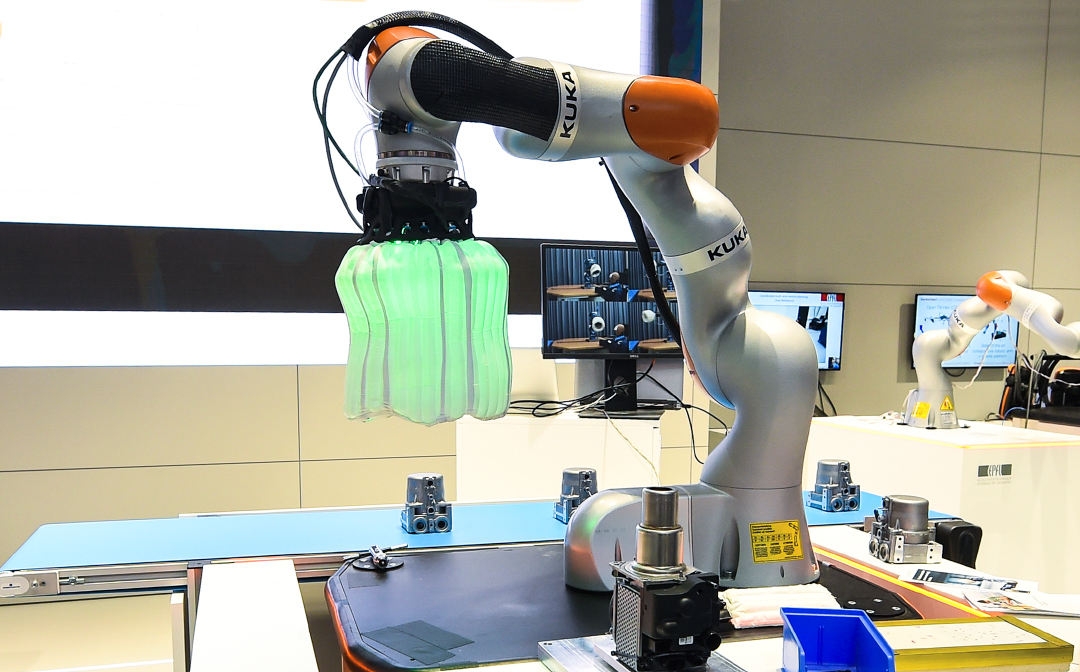
DLR’s lightweight robot technology plays a central role in this respect. It constituted one of the greatest revolutions in recent industrial history. Cobots, new sensitive lightweight robots such as LWR iiwa from KUKA AG master complex hand movements and show consideration for human colleagues – thanks to sensors in their joints capable of recognising physical contacts. In case of collision with a human, the robot stops or backs off, and sensors in the “fingers“ enable tactile identification as well as soft gripping of tools, workpieces or even fruits and vegetables prone to dents.
© KUKA Roboter GmbH
The benefit: a robot like the LWR iiwa can perform non-ergonomic activities as a henchman, for example overhead work or handing over of parts. Since 2009, a prototype version has been used at Mercedes-Benz in the first series deployment worldwide. The technology that has initially emerged from space flight has been developed by the German Aerospace Center (DLR) for use in industry since 2004. DLR researchers are working in close cooperation with their colleagues from KUKA and Daimler. Today, many more automotive manufacturers such as Volkswagen, BMW, and Ford use this technology to relieve humans in their daily work.
The lightweight robot at Mercedes-Benz inserts crown wheels and bearing shells weighing 5‒15 kilogrammes into gear casings.
© KUKA Roboter GmbH

© KUKA
© DLR
© DLR
© DLR
© DLR
© Rinspeed
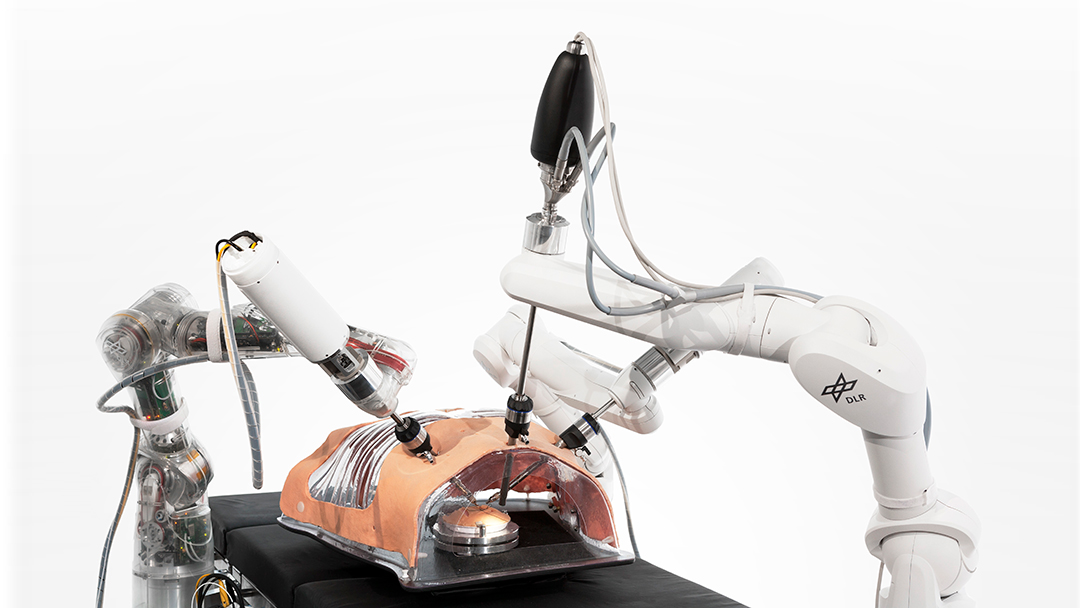
However, robot arms and hands are not only interesting for the industry. They can also “cure” the incurable – or just be fun.
DLR’s HIT Hand II has five fingers and is almost as large as a human hand. A robot, here Justin from DLR, can use tools designed for humans – like this cordless screwdriver. This robot hand, the most highly developed one in the world, is marketed by the DLR spin-off Wessling Robotics GmbH.
© DLR
© NATUREvideo
© DLR
Moreover, the Europe-wide network Digital Innovation Hub Healthcare Robotics (DIH-HERO) is fostering the further technology transfer into practice.
© DLR, Institute of Robotics and Mechatronics
In 2019, Justin assisted ESA astronaut Alexander Gerst in inspection and maintenance of a future solar plant. What was so special about it: Gerst commanded Justin from the International Space Station. In the experiment, Gerst and Justin showed that the cooperation of astronauts in orbit with intelligent robots on the planet’s surface is also ideally suited for future Moon and Mars expeditions.
© DLR, Institute of Robotics and Mechatronics
© DLR

© Roboception GmbH

© DLR
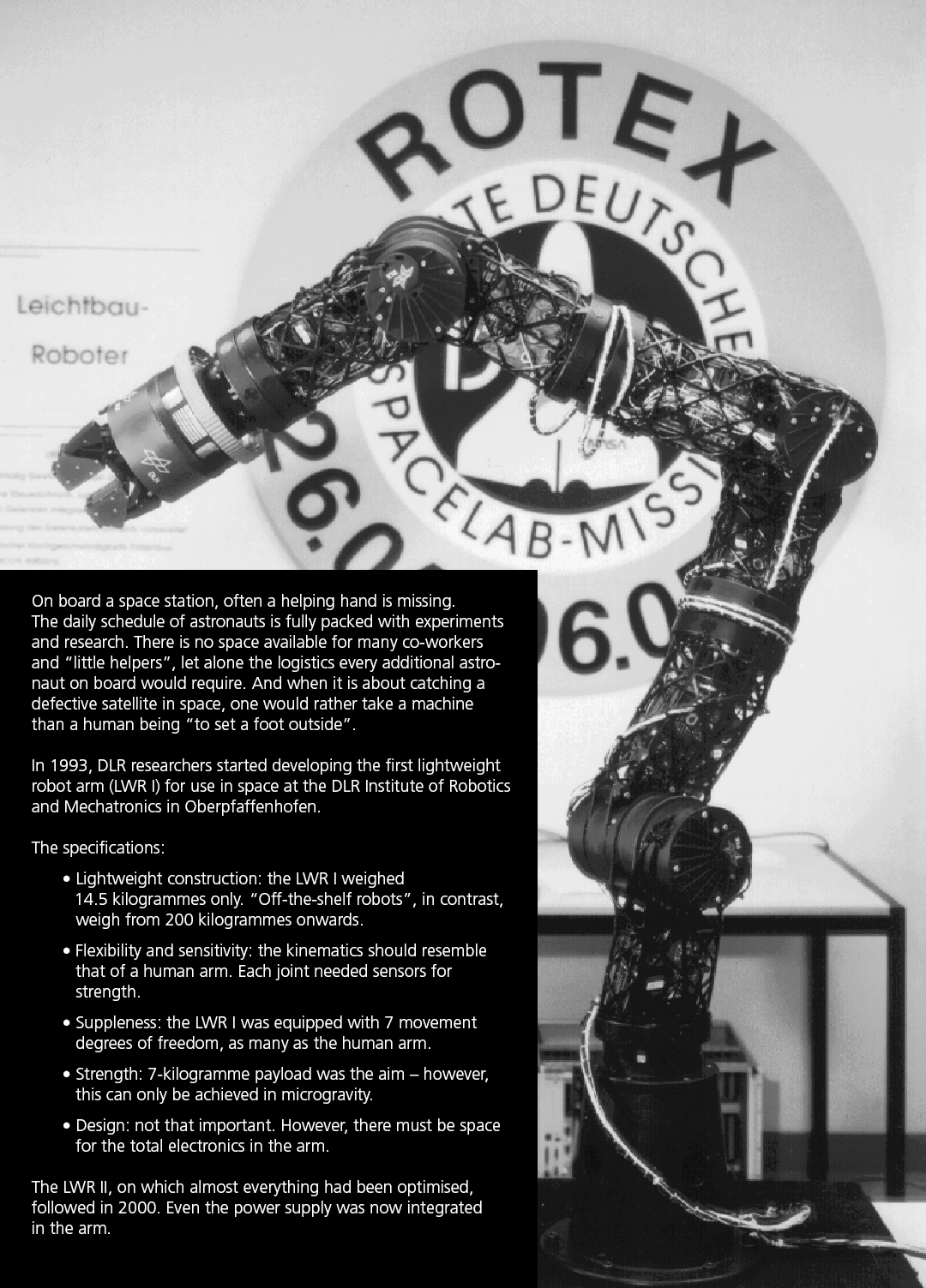
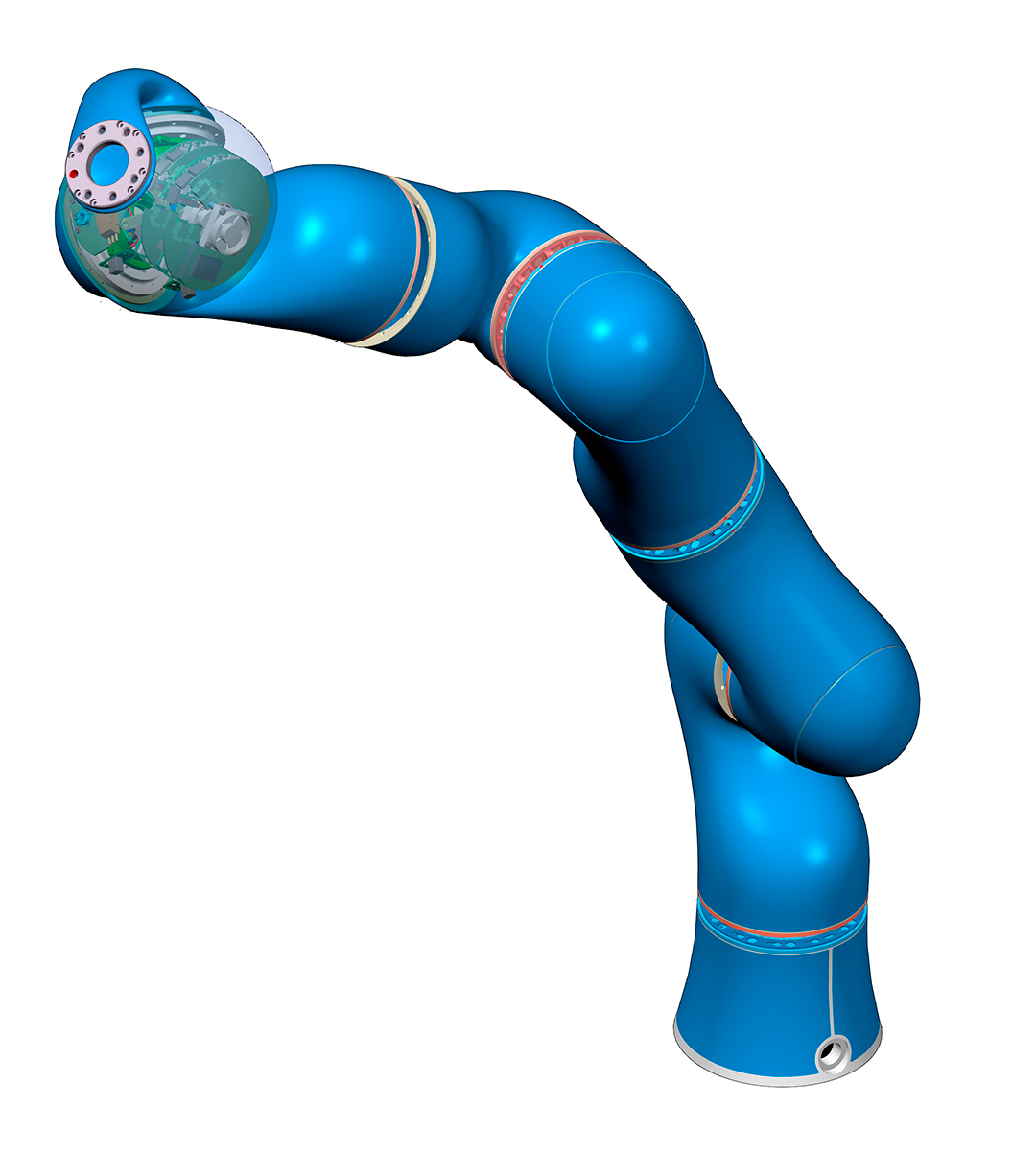
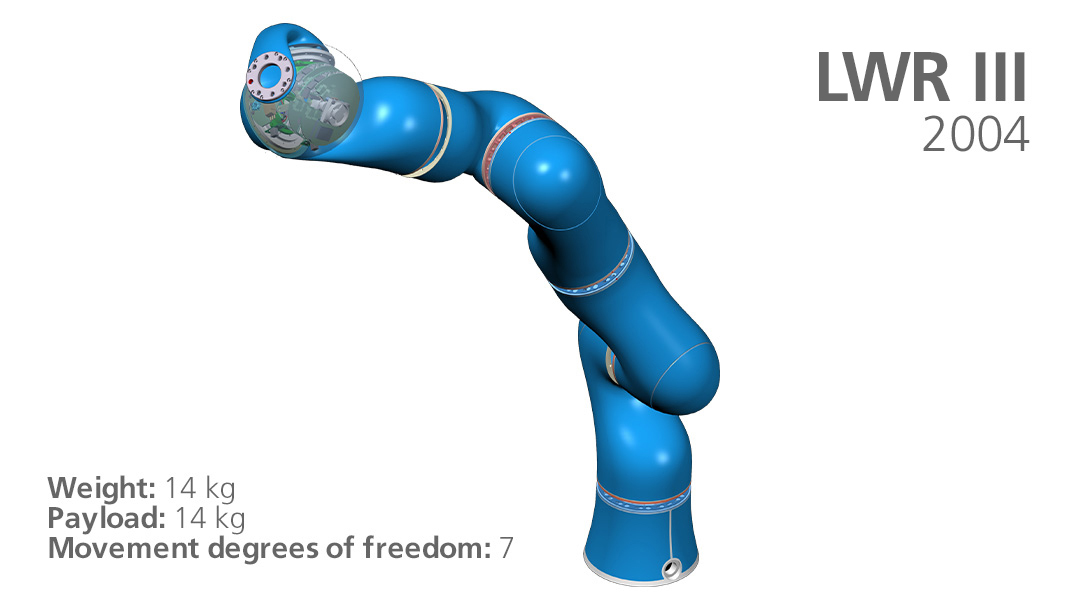
Finally, the breakthrough for use on Earth was the LWR III with a payload of 14 kilogrammes and a weight of 14 kilogrammes. That means stronger motors, even better sensors, and stronger joints. And all that without additional weight. The icing on the cake: an appealing, organic design featuring excellent function at the same time: no corners, no rims, no spaces – and thus no danger for the “human colleagues” to pinch their fingers.

© DLR
© DLR
© DLR
No arm without a hand: the DLR Hand
What is the benefit of an arm with no hand at its end? This also applies to robots. Up to now, robot hands in industrial use are rather grippers, special constructions that are optimised for a single, very special task. In comparison, a human hand is much more versatile. It is extremely complicated to rebuild it; however, it is being accomplished with increasing success. DLR scientists take a leading role in the manufacture of artificial hands.
© DLR
In 1998, the DLR Hand I was introduced, a 4-finger hand with 12 or 13 degrees of freedom (compared to 22 degrees and one additional finger on the human hand).
The DLR Hand I with approx. 1,000 mechanical und 1,500 electric components was considered the most complex of all robot hands built so far worldwide. Each degree of freedom is, so-to-speak, a joint. This meant: 12 drives were required. Nonetheless: the scientists succeeded for the first time in integrating all 12 drives into the hand.
The DLR Hand II, first introduced at the end of 2000, was a further development with better electronics: instead of 400 cables towards the “outside world”, now only 12 came out of the hand.
The DLR HIT Hand II from 2007 is more lightweight although it has now 5 instead of 4 fingers. With 15 degrees of freedom, it is very flexible. It serves as the hand of Space Justin.
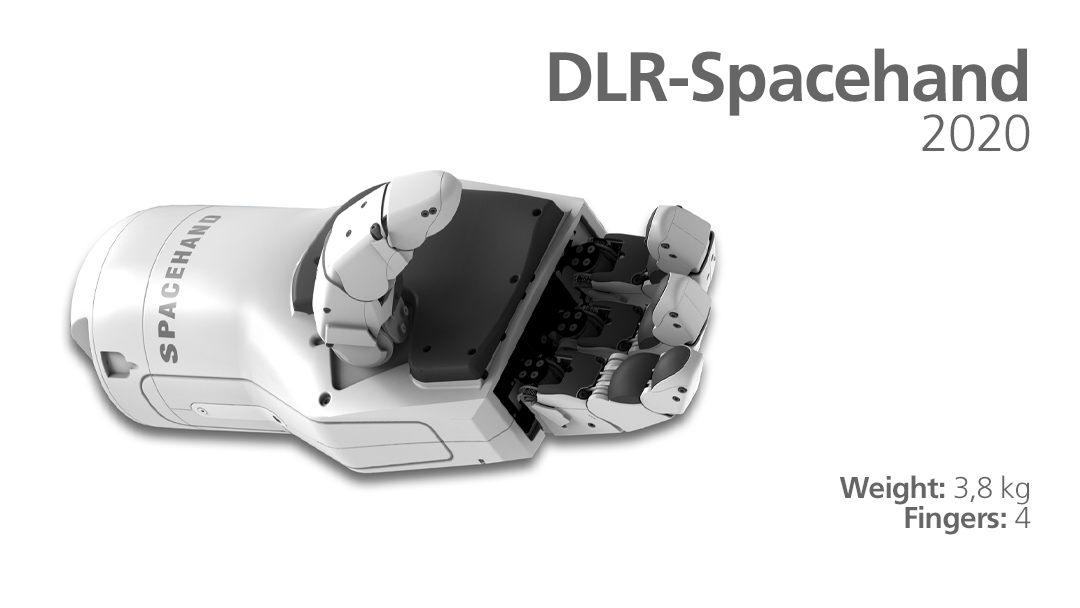
The DLR Spacehand (2020) is celestially good: it is so robust that it can be used in continuous operation in space. Maybe someday it will manufacture bricklayer robots for housebuilding on the Moon? Or service robots for spaceships?

© DLR

© DLR

© DLR
© DLR