
PRIMA – Präzise Manipulation
Laufzeit des Vorhabens: 01.05.2015 – 31.03.2016
Motivation: Die Arbeitsarme von ferngesteuerten mobilen Arbeitsmaschinen –ob es sich um Bagger an Land oder ROVs Unterwasser handelt spielt keine Rolle- werden dadurch bewegt, dass der Benutzer einzelne Achsen mit Hilfe zweier Joysticks steuert. Selbst einfach aussehende Bewegungen erfordern in der Regel eine Überlagerung mehrerer Steuersignale, so dass die Bedienung dieser Maschinen einiges an Arbeit und Erfahrung erfordert. Im Unterwasserbereich kommt hinzu, dass Position und Lage des Endeffektors aufgrund der schlechten optischen Bedingungen sehr schlecht wahrnehmbar sind. Und auch die durch Strömungen induzierte Bewegung des ROV im dreidimensionalen Raum muss durch den Bediener kompensiert werden. In Summe ist damit ein langer Zeitraum der Einarbeitung und des Sammelns von Erfahrung notwendig, bis jemand diese Maschinen bedienen kann.
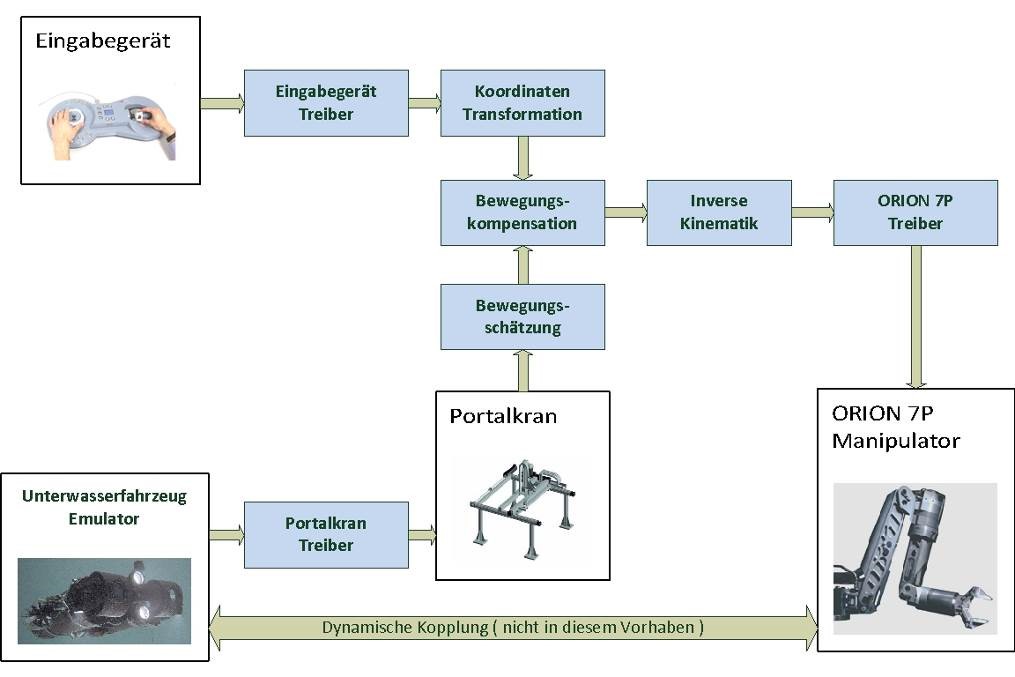
Vorgehen: In dem Vorhaben soll die intelligente Steuerung eines Unterwasser-Manipulatorarms demonstriert werden. Mit Hilfe einer von Bosch entwickelten, verfügbaren Steuereinheit aus dem Baumaschinenbereich, soll der Operator die gewünschte Position des Manipulator-Endeffektors (Greifer) im kartesischen Raum vorgeben können. Die Manipulator-Steuerung wird die entsprechenden Gelenkwinkel berechnen und diese ansteuern, um den Endeffektor an die gewünschte Position zu fahren. Dabei werden eingebrachte Positionsänderungen an der Basis (durch ein Portalkran emulierten Bewegung des Unterwasserfahrzeuges durch z.B. Strömungen) automatisch kompensiert, um den Greifer an der vorgegebenen Position im Raum zu halten. Der Demonstrator besteht aus einem konventionellen Manipulatorarm für die Tiefseeanwendungen, welcher dann mit Hilfe neuer Ansteuerungssoftware, basierend auf den Erkenntnissen in der Raumfahrt auf diesem Gebiet, in einem Testbecken am DFKI in Bremen die vorgesehene Präzision bei der Manipulation nachweist.
Ergebnisse: Um die Vor- und Nachteile der vorgeschlagenen Gesamtlösung zu bewerten, wurde eine Testreihe mit dem Manipulator im Testbecken organisiert. Drei Probanden ohne ROV-Steuerungserfahrung haben jeweils zweimal zwei ausgelesene Anwendungsszenarien (Transponder einsammeln und Blowout-Preventer Leitstandsteuerung) mit Bewegungskompensierung durchgeführt. Nach einer Evaluierungsphase wurden weitere mögliche Unterwassermanipulator-Anwendungsfelder, sowie die Übertragbarkeit des Lösungskonzepts auf größere Sondermaschinen aufgezeigt und allgemeine Verbesserungsvorschläge diskutiert
Institutionen/ Verbundpartner
Robert Bosch GmbH /
CR-AEI
Renningen
Ansprechpartner:
Dr. Luiz Douat
+49 711 811 24526
LuizRicardo.Douat@de.bosch.com
DFKI GmbH /
Robotics Innovation Center
Bremen
Ansprechpartner:
Dr. Sebastian Bartsch
+49 421 178454321
Sebastian.Bartsch@dfki.de
